Cartesian coordinate system
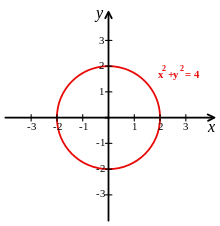
Cartesian coordinates are named for René Descartes, whose invention of them in the 17th century revolutionized mathematics by allowing the expression of problems of geometry in terms of algebra and calculus.For example, a circle of radius 2, centered at the origin of the plane, may be described as the set of all points whose coordinates x and y satisfy the equation x2 + y2 = 4; the area, the perimeter and the tangent line at any point can be computed from this equation by using integrals and derivatives, in a way that can be applied to any curve.Cartesian coordinates are also essential tools for most applied disciplines that deal with geometry, including astronomy, physics, engineering and many more.They are the most common coordinate system used in computer graphics, computer-aided geometric design and other geometry-related data processing.The adjective Cartesian refers to the French mathematician and philosopher René Descartes, who published this idea in 1637 while he was resident in the Netherlands.[1] The French cleric Nicole Oresme used constructions similar to Cartesian coordinates well before the time of Descartes and Fermat.[3] The concept of using a pair of axes was introduced later, after Descartes' La Géométrie was translated into Latin in 1649 by Frans van Schooten and his students.Equivalently, one point can be assigned to a specific real number, for instance an origin point corresponding to zero, and an oriented length along the line can be chosen as a unit, with the orientation indicating the correspondence between directions along the line and positive or negative numbers.The choices of letters come from the original convention, which is to use the latter part of the alphabet to indicate unknown values.If the coordinates of a point are (x, y), then its distances from the X-axis and from the Y-axis are |y| and |x|, respectively; where | · | denotes the absolute value of a number.Alternatively, each coordinate of a point P can be taken as the distance from P to the plane defined by the other two axes, with the sign determined by the orientation of the corresponding axis.The coordinates are usually written as three numbers (or algebraic formulas) surrounded by parentheses and separated by commas, as in (3, −2.5, 1) or (t, u + v, π/2).In mathematics, physics, and engineering contexts, the first two axes are often defined or depicted as horizontal, with the third axis pointing up.In the same way, the points in any Euclidean space of dimension n be identified with the tuples (lists) of n real numbers; that is, with the Cartesian productThe concept of Cartesian coordinates generalizes to allow axes that are not perpendicular to each other, and/or different units along each axis.In analytic geometry, unknown or generic coordinates are often denoted by the letters (x, y) in the plane, and (x, y, z) in three-dimensional space.In mathematical illustrations of two-dimensional Cartesian systems, the first coordinate (traditionally called the abscissa) is measured along a horizontal axis, oriented from left to right.The second coordinate (the ordinate) is then measured along a vertical axis, usually oriented from bottom to top.Young children learning the Cartesian system, commonly learn the order to read the values before cementing the x-, y-, and z-axis concepts, by starting with 2D mnemonics (for example, 'Walk along the hall then up the stairs' akin to straight across the x-axis then up vertically along the y-axis).This convention developed in the 1960s (or earlier) from the way that images were originally stored in display buffers.For three-dimensional systems, a convention is to portray the xy-plane horizontally, with the z-axis added to represent height (positive up).If a diagram (3D projection or 2D perspective drawing) shows the x- and y-axis horizontally and vertically, respectively, then the z-axis should be shown pointing "out of the page" towards the viewer or camera.In such a 2D diagram of a 3D coordinate system, the z-axis would appear as a line or ray pointing down and to the left or down and to the right, depending on the presumed viewer or camera perspective.[8] The axes of a two-dimensional Cartesian system divide the plane into four infinite regions, called quadrants,[8] each bounded by two half-axes.When the axes are drawn according to the mathematical custom, the numbering goes counter-clockwise starting from the upper right ("north-east") quadrant.Similarly, a three-dimensional Cartesian system defines a division of space into eight regions or octants,[8] according to the signs of the coordinates of the points.The generalization of the quadrant and octant to an arbitrary number of dimensions is the orthant, and a similar naming system applies.The red circle is parallel to the horizontal xy-plane and indicates rotation from the x-axis to the y-axis (in both cases).Thus the "correct" way to view Figure 8 is to imagine the x-axis as pointing towards the observer and thus seeing a concave corner.In a two-dimensional cartesian plane, identify the point with coordinates (x, y) with the complex number z = x + iy.







geometrycoordinate systemreal numberssignedperpendicularoriented linescoordinate linesorigindirectionsorthogonal basiscoordinate framethree-dimensional spaceEuclidean spacedimensionhyperplanesRené Descartesalgebracalculuscurvesequationscircleperimetertangent lineintegralsderivativesanalytic geometrylinear algebracomplex analysisdifferential geometrygroup theorygraph of a functionastronomyphysicsengineeringcomputer graphicscomputer-aided geometric designgeometry-related data processingmathematicianphilosopherPierre de FermatLa GéométrieFrans van SchootenIsaac NewtonGottfried Wilhelm Leibnizvector spacespolar coordinatessphericalcylindrical coordinatesNumber lineaffine linedegrees of freedomlinear interpolationorientedgeometric transformationfunction of a real variabletranslationscalinglinear functionaffine mapTwo-dimensional spaceordered pairunit of lengthabscissaordinateEuclidean planeunit circleunit squareunit hyperbolaright anglesdistancesabsolute valueoctantsright-hand ruleCartesian producttupleshyperplaneoblique coordinate systemaffine planeparenthesespressurecomputer programmingrecordsubscripthorizontalverticalimage processingdisplay buffers3D projection2D perspective drawingperspectiveOctant (solid geometry)Quadrant (plane geometry)Roman numeralscounter-clockwiseorthantEuclidean distancePythagoras's theoremEuclidean transformationsbijectivetranslationsrotationsreflectionsglide reflectionsTranslatingrotatecounterclockwisereflectionaffine transformationscolumn matrixmatrixorthogonalorthogonal vectorsEuclidean normtransposeidentity matrixaffine transformationif and only ifrotation matrixcomposedaugmented matrixcompositionshearing transformationOrientabilityAxes conventionsindex fingermiddle finger