Electric motor
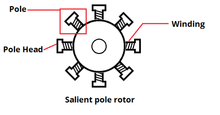
The rotor typically holds conductors that carry currents, on which the magnetic field of the stator exerts force to turn the shaft.Resin-packed motors, used in deep well submersible pumps, washing machines, and air conditioners, encapsulate the stator in plastic resin to prevent corrosion and/or reduce conducted noise.Windings are coiled wires, wrapped around a laminated, soft, iron, ferromagnetic core so as to form magnetic poles when energized with current.The first electric motors were simple electrostatic devices described in experiments by Scottish monk Andrew Gordon and American experimenter Benjamin Franklin in the 1740s.[14] Faraday published the results of his discovery in the Quarterly Journal of Science, and sent copies of his paper along with pocket-sized models of his device to colleagues around the world so they could also witness the phenomenon of electromagnetic rotations.Barlow's wheel was an early refinement to this Faraday demonstration, although these and similar homopolar motors remained unsuited to practical application until late in the century.[35][36] The first commercially successful DC motors followed the developments by Zénobe Gramme who, in 1871, reinvented Pacinotti's design and adopted some solutions by Werner Siemens.[37] The drum rotor was introduced by Friedrich von Hefner-Alteneck of Siemens & Halske to replace Pacinotti's ring armature in 1872, thus improving the machine efficiency.In 1886, Frank Julian Sprague invented the first practical DC motor, a non-sparking device that maintained relatively constant speed under variable loads.The development of electric motors of acceptable efficiency was delayed for several decades by failure to recognize the extreme importance of an air gap between the rotor and stator.Electric motors applied in agriculture eliminated human and animal muscle power from such tasks as handling grain or pumping water.Household uses (sauch as washing machines, dishwashers, fans, air conditioners and refrigerators) of electric motors reduced heavy labor in the home and made higher standards of convenience, comfort and safety possible.[50][51][52][53] The constant speed AC induction motor was found not to be suitable for street cars,[46] but Westinghouse engineers successfully adapted it to power a mining operation in Telluride, Colorado in 1891.After an agreement between AEG and Maschinenfabrik Oerlikon, Doliwo-Dobrowolski and Charles Eugene Lancelot Brown developed larger models, namely a 20-hp squirrel cage and a 100-hp wound rotor with a starting rheostat.If the engine slows down relative to the desired speed, the current increases, producing more torque, pulling against the return spring and opening the throttle.Low-power synchronous timing motors (such as those for traditional electric clocks) may have multi-pole permanent magnet external cup rotors, and use shading coils to provide starting torque.In that design, the rotor fits inside a magnetically soft cylinder that can serve as the motor housing, and provides a return path for the flux.The vibrating alert of cellular phones can be generated by cylindrical permanent-magnet motors, or disc-shaped types that have a thin multipolar disc field magnet, and an intentionally unbalanced molded-plastic rotor structure with two bonded coreless coils.The unique advantage of ironless DC motors is the absence of cogging (torque variations caused by changing attraction between the iron and the magnets).Large, powerful, but slow-responding servo loops may use conventional AC or DC motors and drive systems with position or speed feedback.AC motors' superior power density and acceleration characteristics tends to favor permanent magnet synchronous, BLDC, induction, and SRM drive approaches.Simple stepper motor drivers entirely energize or entirely de-energize the field windings, leading the rotor to "cog" to a limited number of positions.Microstepping drivers can proportionally control the power to the field windings, allowing the rotors to position between cog points and rotate smoothly.So-called quartz analog wristwatches contain the smallest commonplace stepping motors; they have one coil, draw little power, and have a permanent magnet rotor.Electrostatic motors find frequent use in micro-electro-mechanical systems (MEMS) where their drive voltages are below 100 volts, and where moving, charged plates are far easier to fabricate than coils and iron cores.[87] Low initial cost Medium lifespan Costly commutator and brushes Paper making machines Treadmill exercisers Automotive accessories Low maintenance High efficiency Requires EC controller with closed-loop control CD/DVD players Electric vehicles RC Vehicles UAVs Low maintenance High efficiency No permanent magnets Low cost Simple construction possible High iron losses Not possible: * Open or vector control * Parallel operation Requires EC controller[83] Electric Vehicles Textile mills Aircraft applications Shorter lifespan Usually acoustically noisy Only small ratings are economical squirrel-cage or wound-rotor induction motor (SCIM) orAlways limited by magnetic core saturation or safe operating temperature rise and voltage, the capacity for torque bursts beyond the maximum differs significantly across motor/generator types.[109] The dual ported transformer circuit topology is known to be unstable and requires a multiphase slip-ring-brush assembly to propagate limited power to the rotor winding set.Despite the high coercivity of neodymium or samarium-cobalt permanent magnets, continuous torque density is virtually the same amongst electric machines with optimally designed armature winding sets.Continuous torque density relates to method of cooling and permissible operation period before destruction by overheating of windings or permanent magnet damage.









Motor (disambiguation)Electric locomotiveMagnet motorelectrical energymechanical energymagnetic fieldelectric currentwire windingtorqueelectric generatordirect currentrectifiersalternating currentinvertersbrushedbrushlesssingle-phasetwo-phasethree-phaseradial fluxpumped-storagemegawattsregenerative brakingtraction motorsactuatorSolenoidsstatormagnetic circuitelectromagnetspermanent magnetsRotor (electric)electrical steelencapsulateAir gap (magnetic)Electromagnetic coilarmatureferromagneticLorentz forcecoiledferromagnetic coreshaded-pole motorCommutator (electric)Commutatoruniversal motorelectrical switchelectrical contactsbrushescarboncurrentbrushless motorspermanent magnet motorsinduction motorsBearing (mechanical)bearingsHistory of the electric motorFaraday'selectrostatic devicesAndrew GordonBenjamin FranklinCoulomb's lawHenry CavendishCharles-Augustin de CoulombAlessandro VoltaHans Christian ØrstedAndré-Marie AmpèreAmpère's force lawMichael FaradayRoyal Institutionpermanent magnet (PM)Quarterly Journal of ScienceBarlow's wheelhomopolar motorsJedlikKelvinJames JouleHungarianphysicistÁnyos Jedlikelectromagnetic coilsDC motorWilliam SturgeonThomas DavenportEmily Davenportprimary battery powerelectricity distributionMoritz von Jacobielectric vehicleAntonio PacinottiZénobe GrammeWerner SiemensFriedrich von Hefner-AlteneckJonas WenströmFrank Julian SpragueThomas EdisonRichmond, VirginiaSouth Side Elevated Railroadair gapAC motorFrançois Aragorotating magnetic fieldsArago's rotationsinduction motorGalileo FerrarisNikola Teslareluctance motorsynchronous motorGeorge WestinghouseC.F. ScottB.G. LammeMikhail Dolivo-DobrovolskytransformerMaschinenfabrik OerlikonCharles Eugene Lancelot BrownGeneral Electric Companysquirrel-cage rotorhorsepowerUniversal motorspulse-width modulationmotor soft starterspower invertervariable-frequency drivebrushless DC motorswitched reluctance motormagnetismelectrostaticspiezoelectricity