Autonomous aircraft
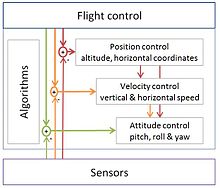
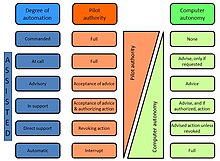
Most contemporary autonomous aircraft are unmanned aerial vehicles (drones) with pre-programmed algorithms to perform designated tasks, but advancements in artificial intelligence technologies (e.g. machine learning) mean that autonomous control systems are reaching a point where several air taxis and associated regulatory regimes are being developed.The earliest recorded use of an unmanned aerial vehicle for warfighting occurred in July 1849,[1] serving as a balloon carrier (the precursor to the aircraft carrier)[2] Significant development of radio-controlled drones started in the early 1900s, and originally focused on providing practice targets for training military personnel.[3] Autonomous features such as the autopilot and automated navigation were developed progressively through the twentieth century, although techniques such as terrain contour matching (TERCOM) were applied mainly to cruise missiles.Some modern drones have a high degree of autonomy, although they are not fully capable and the regulatory environment prohibits their widespread use in civil aviation.The personal air vehicle is another class where from one to four passengers are not expected to be able to pilot the aircraft and autonomy is seen as necessary for widespread adoption.These bi-directional narrowband radio links carried command and control (C&C) and telemetry data about the status of aircraft systems to the remote operator.Individual task planning/execution Choose target of opportunity (example: go SCUD hunting) Data in limited range, timeframe and numbers Limited inference supplemented by off-board data Enemy trajectory estimated Multi-Vehicle Cooperation supplemented by off-board data Enemy trajectory sensed/estimated Possible: close air space separation (+/-100yds) for AAR, formation in non-threat conditions Multi-Vehicle Coordination Fused with off-board data RT Health Diagnosis Ability to compensate for most failures and flight conditions; Ability to predict onset of failures (e.g. Prognostic Health Mgmt) Group diagnosis and resource management Collision avoidance Medium vehicle airspace separation (hundreds of yds) Vehicle Assigned Rules of Engagement RT Health Diagnosis; Ability to compensate for most failures and flight conditions – inner loop changes reflected in outer loop performance Self resource management Deconfliction Medium vehicle airspace separation (hundreds of yds) RT Health Diagnosis (What is the extent of the problems?)Ability to compensate for most failures and flight conditions (i.e. adaptative inner loop control) Abort/RTB is insufficient Off-board replan (as required) in response to mission and health conditions Mission Flight Control and Navigation Sensing Report status Piloted Vehicle Nose camera Remote pilot commands Medium levels of autonomy, such as reactive autonomy and high levels using cognitive autonomy, have already been achieved to some extent and are very active research fields.High-altitude outdoor navigation does not require large vertical fields-of-view and can rely on GPS coordinates (which makes it simple mapping rather than SLAM).[clarification needed] In the military sector, American Predators and Reapers are made for counterterrorism operations and in war zones in which the enemy lacks sufficient firepower to shoot them down.In September 2013, the chief of the US Air Combat Command stated that current UAVs were "useless in a contested environment" unless crewed aircraft were there to protect them.


aircraftautonomous roboticremote controlunmanned aerial vehiclesalgorithmsartificial intelligencemachine learningair taxisHistory of unmanned aerial vehiclesWinston Churchilltarget droneballoon carrieraircraft carrierA. M. Lowterrain contour matchingcruise missilesAutopilotpersonal air vehiclesystem-on-a-chipsingle-board computersinertial measurement unitactuatorsdigital electronic speed controllersenginespropellersservomotorsreal-timeRaspberry PisBeagleboardsRT LinuxXenomaiArduCopterOpenPilotLibrePilotPaparazziPX4 autopilotLinux FoundationOpen loopClosed loopPID controllerfeedforwardexchange of video and other datanarrowbandtelemetrysatellitesatellite navigationbroadbandquality of serviceTCP/IPmilitary ground control station (GCS)MAVLinkmilitary powerssensor fusionhierarchical control systemsscriptsfinite state machinesbehavior treeshierarchical task plannersquadcoptermotion planningtree searchesgenetic algorithmsAutolandimage recognitionaerobaticsAir Force Research Laboratoryloop performancePerceptual control theorycollision avoidancesituational awarenessoptic flowlidarsradarssonarsodometryphotogrammetrystereophotogrammetricphased arrayspatial light modulatorsfrequency-modulated-continuous-wavevertical-cavity surface-emitting lasersSwarm roboticsRobot swarmingbio-inspiredPredatorsReaperscounterterrorismantiaircraft defensesair-to-air combatAir Combat CommandCongressional Research ServiceGeneral AtomicsAvengerHigh Energy Liquid Laser Area Defense SystemCognitive radiodistributed neural networksMobile robotsuncrewed vehiclesUnmanned aerial vehicle (UAV)Unmanned combat air vehicle (UCAV)AerobotHelicamList of unmanned aerial vehicle applicationsOrnithopterWalkingHumanoidAndroidHexapodUnmanned ground vehicle (UGV)Automated guided vehicle (AGV)Self-driving carAutomatic train operation (ATO)Unmanned underwater vehicle (UUV)Autonomous underwater vehicle (AUV)Intervention AUV (I-AUV)Remotely operated underwater vehicle (ROUV)Underwater gliderUnmanned surface vehicle (USV)Uncrewed spacecraftlist of probeslist by programlist of orbitersCargo spacecraftspaceflights to the ISSSpace telescopeDomestic